
Professor in Residence, Department of Architecture, GSD, Harvard University, Cambridge MA, USA
Policy
Open Access
Type
Article
ABSTRACT -
Integration of “active” materials into architectural assemblies could have a transformative effect on how we experience dynamics of the built environment. Material actuation offers a different way of generating dynamics in architectural surfaces and components. It operates without a need for multiple mechanical components. Active materials such as Shape Memory Alloy (SMA), electroactive polymers, bimetals, or even natural materials such as wood, have been explored in experimental and research projects focused on dynamic architectural assemblies. This paper focuses on SMA and considers several distinct approaches to integrating it into surfaces/elements and how its capacity to change a length or shape can be used to kinetically activate material systems. It provides an overview of a number of projects and prototypes that use SMA actuation and examines the challenges and opportunities presented by its use. The goal of this paper is to bring new insights into material-based actuation of dynamic material systems. Therefore, it offers a comparative discussion of SMA actuation and attempts to categorize their possible use in architectural assemblies.
Despite the dynamic conditions of their external and internal environments, buildings are traditionally thought of as stable and inactive. Increasingly though, buildings are expected to actively respond to climate, energy, and human pressures. Emerging ecological demands, in particular, have driven the development of technical solutions that enable active engagement with changing conditions. Already, there are many adaptive building skins that respond dynamically to sun exposure: the Q1 Headquarters building for ThyssenKrupp in Essen, Germany, designed by Chaix & Morel (Paris) and JSWD Architekten (Cologne); theAl-Bahr Towers in Abu Dhabi, UAE, designed by AHR; The One Ocean pavilion for Expo 2012 in Yeosu, South Korea, designed by SOMA from Vienna, Austria; The Council House 2(CH2) building in Melbourne, Australia, designed by Mick Pearce. Nonetheless most adaptive skins, including these examples, rely on mechanical or hydraulic systems of actuation. These systems are complex and costly, producing undesirable noises and vibration. Their large-scale motors and other mechanical parts are high in maintenance and electricity consumption.
The use of smart materials in kinetic architectural assemblies presents a different approach to actuation by recognizing the active role that matter can play. Addington and Schodek identify smart materials as having embedded functions that involve specific responses based on:
(1) internal changes of physical properties of the material or,
(2) external energy exchanges.
According to them, these materials can play an important role in intelligent assemblies because their functional responses can be designed and calibrated.1 Whether they are bioengineered, smart, metamaterials, or include embedded electronics, what distinguishes these materials are the behaviors they exhibit. The performativity of these materials lies in their capacity to engage with surrounding energy fields or chemical environments, and contribute to them. This exchange results in a variety of behaviors that suggest these materials as exciting possible substitutes for complex mechanical components, or as novel smart surfaces that can outperform more traditional materials in capturing heat, regulating humidity, repelling or attracting water, generating movement, etc.
This paper primarily discusses the use of Shape Memory Alloy (SMA) as a material actuator. It explores how SMA material actuation is employed, and how its resultant kinetic action is influenced by the nature of its integration into a dynamic assembly. The reviewed projects provide a framework for categorization. However, there are other active materials such as wood, shape memory polymers, bimetals, or active composite materials that can cause dynamic effects through their dimensional change. Material actuation based on these materials differs significantly from mechanical actuation by relying entirely on the material’s own capacity to produce movement.
ARCHITECTURAL ASSEMBLY AS AN ADAPTIVE MATERIAL SYSTEM
Material systems in nature generate movement and force through the interaction of materials, structures, energy sources, and sensors,2 but do not distinguish between structural and functional properties within material itself. The hierarchical structure of natural material systems span several orders of magnitude which support the change of properties from one hierarchical level to the next,3 promoting variability and active adjustment to the ever-changing environment. Engineered systems, on the other hand, are designed to perform specific tasks under predictable external conditions and have their performance goals adjusted immediately if variation in performance is observed.4 There is a need for a new class of adaptive systems able to operate in changing external or internal conditions, capable of variation in performance with performance goals adjusted to interface effectively with the unpredictability of indeterminate occurrences. Architects are now beginning to recognize the role active matter can play in the interchange between the built environment and its larger material, social, and ecological context. This shift from “what the building is to what it does” 5 gives rise to a new attitude where architecture can become an active participant in its environment.
To achieve the adaptivity that our current climate predicament demands of us, we need to look beyond traditional architectural materials and assemblies. Technology transfers from fields such as material science, biomimetics, autonomous robotics, soft robotics, interface design, and computation are influencing not only the range of the materials used in architecture, but even the very scale at which they are deployed. In this context, smart materials present an opportunity to augment the capabilities of architectural assemblies. Architectural components conventionally rely on engineering criteria that promote constancy in performance.6 Smart materials, though, are technologies of motion, energy, and exchange.7 Their activation is triggered by chemical, electrical, magnetic, or other interactions between molecular layers. Radically different from normative building materials, they are designed to dynamically respond to energy fields.
MATERIAL ACTUATION
Material-based actuation echoes biological paradigms of kinetic adaptation, which rely on inherent (internal) instead of mechanical (external) actuation. Wood is one material with an intrinsic capacity to produce an actuated response. In his project HygroScope, Achim Menges employed the material instability of wood caused by its moisture content to construct a climate responsive material morphology. David Correa et al., building on inherent anisotropic properties of wood, designed 3D-printed custom wood grain structures that can be tuned to specific self-transformations.8 Another trajectory in material-based activation works with two (or more) materials that react to environmental changes at dimensionally different rates. Recently developed self-shading windows by Doris Sung use thermo-bimetal to regulate a heat gain and glare. Enclosed within insulated glass units, the self-powered bimetal elements respond to solar heat by curling in different directions to shade the windows.9 Similar to Sung’s Bloom project, the action of two laminated sheets of metal with different rates of thermal expansion produce a dynamic effect as they heat up and cool down.
In contrast to materials stimulated by ambient energy (wood, bimetals), the behavior of smart materials can be dynamically adjusted by controlled stimuli. Shape Memory Polymers (SMPs) can be programmed to take a temporary shape and then be stimulated to recover their original shape. Efilena Baseta, in her project Translated Geometries, integrates SMP joints into a triangulated origami pattern. The SMP joints act as live hinges that simultaneously connect and activate the origami components of the surface. The local change of shape in the SMP joints produces a global transformation of the entire surface.10
Building on this characteristic attribute of SMP, Chen et al. designed a programmable actuator capable of autonomous geometric transformation by incorporating multi-material 3D printing and a bistable mechanism. The SMP initiates a transformation through temperature change while the bistable mechanism (with two stable equilibrium positions separated by an unstable equilibrium position) amplifies the force exerted by the SMP. These actuators are designed to be assembled into larger reconfigurable structures, and the kinetic capacity of these joints can be applied in architectural assemblies.11 These examples show the range of possibilities afforded by active materials. Their capacity for behavior is inspiring architects and designers to rethink and explore dynamic material assemblies.
SHAPE MEMORY ALLOY (SMA)
Shape Memory Alloy is successfully used as an actuator in robotics, aircraft hydraulic systems, microcircuit breakers, temperature controls, electronic locks, and even medically as reinforcement for arteries and veins (stents) or in dental braces. In the building industry, superelastic SMA is used in seismic devices, to restrain movement during an earthquake, and for post-tensioning concrete structures that have fractured from insufficient shear resistance. In all these instances, the superelasticity of SMA is utilized to prevent structures from excessive deformation by yielding to, and then recovering from, deformation.12 In architecture, the use of shape memory wire is particularly interesting for the activation of dynamic skins, even though its use is still relatively new and limited. Similar to other thermally sensitive smart materials SMA reacts to temperature changes in its environment with a significant material response at the molecular level. This is possible due to a phase change that occurs within its crystalline structure, transitioning between a high-temperature phase (austenite) and a low-temperature phase (martensite). This internal molecular elasticity enables SMA to deform significantly without residual strain,13 and recover its initial shape after deformation through a reversible thermo-elastic phase transformation.
There are several types of SMAs. The most common are based on a combination of nickel and titanium (Ni-Ti), with roughly 55–56% nickel and 44–45% titanium. The temperature of transition can be calibrated through adjustments to this ratio, producing SMAs that contract at room temperature, body temperature, etc. When SMA changes from its martensite to austenite phase, the resulting stress within the material causes a 4–5% wire contraction, producing motion.14 This shape memory effect has been found in many types of alloys: Ni-Ti, CuAlNi, CuZnAl, AuCd, FeMn, etc. However, Ni-Ti (also known as “Nitinol”) is used most often for its corrosion resistance, ductility, high deformation recovery, and biocompatibility properties.15
When SMA wire is “trained” by baking the material into a particular shape, it remembers that geometry and, if deformed, returns to it when exposed to heat. It can also have superelastic properties. Superelastic SMA wire is in austenite state at room temperature and, when deformed, changes its state to martensite. After the load is removed, the superelastic SMA wire returns either to its austenite state or its original shape. Shape memory wire is in martensite state at room temperature and will change its state to austenite phase when exposed to heat.16 In the architectural examples discussed in this paper, there are two criteria that provide a framework for analysis and indexing:
(1)the nature of SMA kinetic action on the assembly (length change, geometry change), and
(2)the way SMA is integrated into a dynamic material assembly (embedded into material substrate, using the action of a lever, combined with a mechanical mechanism).
These systems of classification delineate the way SMA is utilized as an actuator and highlight the specific opportunities and challenges of the application. The kinetic action of the SMA is most often used to activate a lever or a system of pulleys that, in turn, can animate the surface or construct, as shown in the work of Philip Beesley and his Hylozoic Ground project. If embedded in the surface, the force of the activated SMA wire has the capacity to change the surface topography. David Benjamin and Soo-in Yang utilize this process in their Living Glass project to open their silicone surface’s “gills.” As these examples show, the force produced by the action of the SMA can:
(1)act indirectly, by producing motion in another connected component that could in turn move a larger construct, or
(2)activate the surface directly, by producing a tension within its material layers.
Because SMA wire can also be trained to return to a specific shape after deformation, a prescribed change in the construct can be easily triggered, as demonstrated by the SKiN and Lattice projects by the author, described later in this paper. This aspect of SMA remains currently underexplored at the scale of architectural assembly and this research, particularly the Lattice project, presents a novel way of amplifying the force of SMA at a larger scale.
EXPLORING THE SMA WIRE LENGTH CHANGE
The Air Flow(er) project, proposed in 2009 by architect and software developer Andrew Payne, is a ventilation device that uses SMA as a sensor, processor, and actuator. The device is thermally active and responsive to specific temperatures. It is imagined as one component of a double-skin façade system. When exposed to heat, the two SMA wires across each module opening shorten, pulling and rotating opposite panels across pivot points and opening the module; when the wires cool and lengthen, the integrated elastic cords ease the panels back into their original position (Fig. 1).
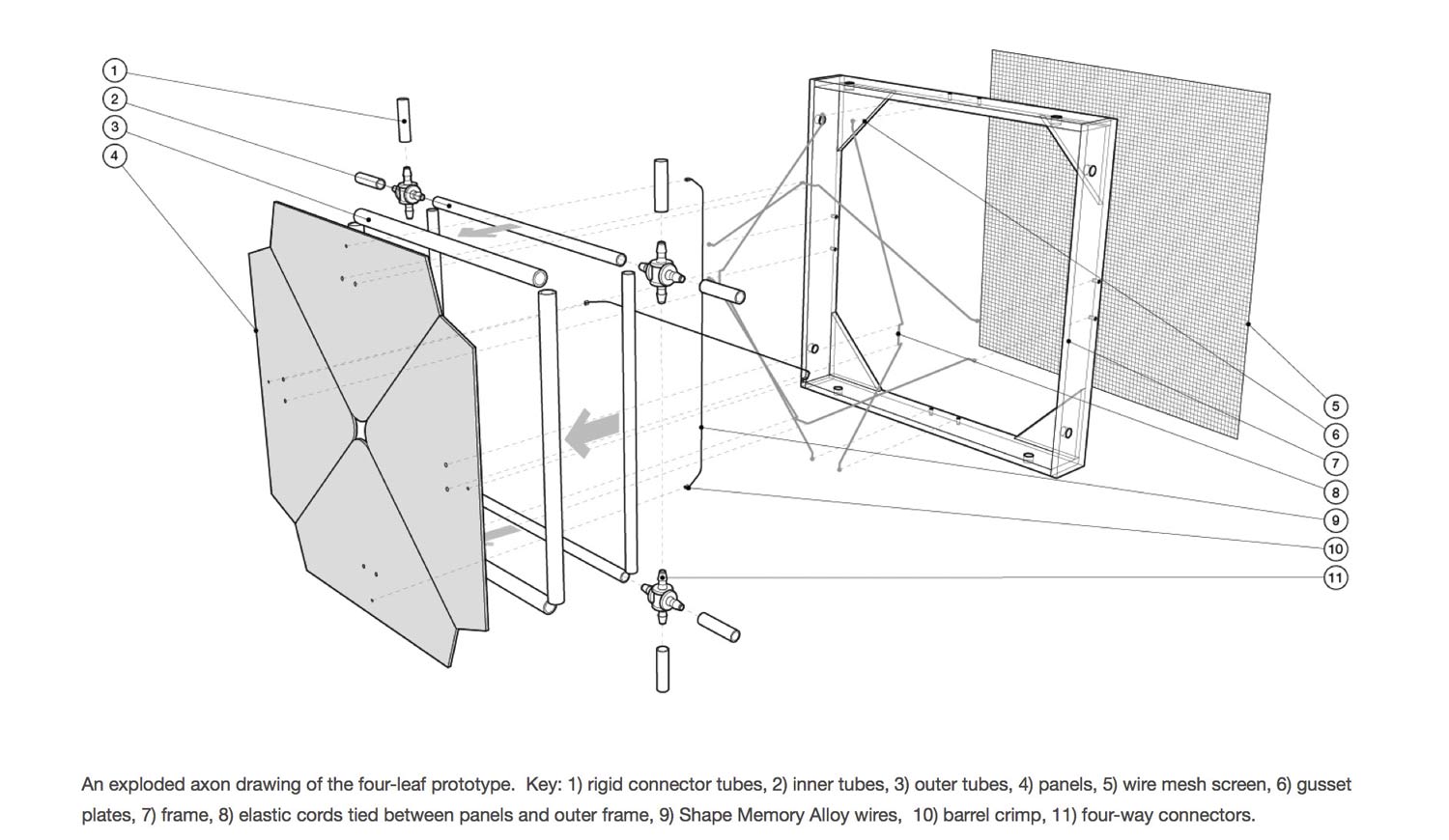
Figure 1.
1
Four-leaf prototype assembly diagram (1) rigid connector tubes, (2) inner tubes, (3) outer tubes, (4) panels, (5) wire mesh screen, (6) gusset plates, (7) frame, (8) elastic cords tied between panels and outer frame, (9) SMA wires, (10) barrel crimp, (11) four-way connectors.
According to Payne, Air Flow(er) can provide an automatic response in summer to temperatures in the cavity between the inner and outer skin, allowing hot air to vent out of the building, and in so doing mitigate solar gain and decrease the cooling load on the building’s mechanical equipment. In the winter, absorbed radiation can be retained within the double-skin façade’s cavity, using the absorbed radiation to minimize the façade heat loss.17
This materially actuated device is energy independent and, without mechanical parts or motors, the system’s movement is completely silent. In addition to its environmental contribution the system could generate dynamic material effects across the entire building façade. With devices heating at different rates, a building skin would reflect the exchange of air and make visible the subtle processes of energy exchange between building skins and their surroundings. One of the challenges associated with the use of ambient temperature activated SMA, though, is that its calibrated response means the system cannot be user operated. This absence of control can be problematic if the system of air exchange could benefit from opening or closing outside of the designed SMA wire austenite (active) phase.
The power of a silent dynamic environment is best experienced in the Hylozoic Ground experimental architecture series by Philip Beesley, an architect and educator at the University of Waterloo in Canada. Featured at the 2010 Venice Biennale, the project is made up of an intricate lattice of acrylic meshwork and covered with interactive fronds, filters, and whiskers.18 Equipped with microprocessors and proximity sensors, the installation offers an immersive experience that reacts to human presence and movement. The environment includes several kinds of actuating elements: breathing pores, sensor lashes, filters, and crickets, all actuated by SMA wires.19 The simple dimensional contraction of SMA is amplified by the use of levers or systems of pulleys. When used in this manner, the length of the SMA wire plays an important role in the amplitude of movement. The breathing pores and lashes are driven by 10 in. [254 mm] long Flexinol wire that is only 300 microns [0.01 in.] in diameter, so the contraction of this long wire, amplified by mechanical leverage, translates into a curling motion of the mylar frond.
Filters and crickets, meanwhile, use shorter lengths of wire in series to provide more subtle kinetic responses. The wire diameter plays an important role since it determines the weight the SMA wire can lift (e.g., an SMA “muscle” wire with a 0.004 in. [0.1016 mm] diameter can pull 150 g [5.29 oz] per one foot [30.48 cm] of wire while a 0.012 in. [0.31 mm] thick wire can pull 1,250 g [2.76 lb.] per foot [30.48 cm] of wire).20
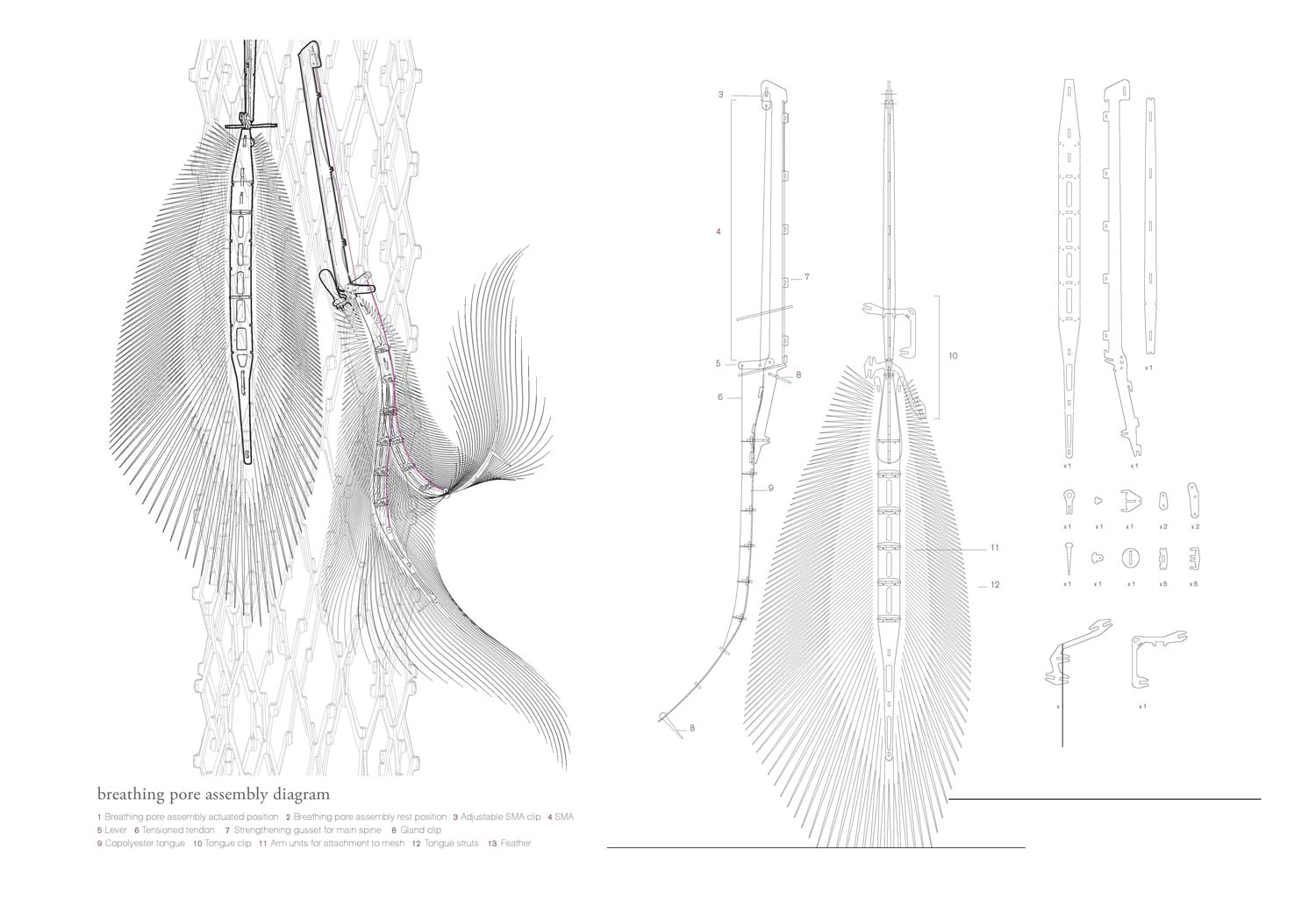
Figure 2.
2
Hylozoic Ground project breathing pore assembly diagram (1) breathing pore assembly actuated position, (2) breathing pore assembly rest position, (3) adjustable SMA clip, (4) SMA, (5) lever, (6) tensioned tendon, (7) strengthening gusset for main spine, (8) gland clip, (9) copolyester tongue, (10) tongue clip, (11) arm units for attachment to mesh, (12) tongue struts, (13) feather.
Figure 2 shows a breathing pore assembly diagram where the SMA wire (4) and a tensioned tendon (6), shown in color, act in unison to curl the mylar frond. (The position change of the mechanical leverage hand is also visible in the axonometric part of the diagram.) The complexity of Hylozoism Ground lies in the need to orchestrate and coordinate many dynamic regions: as a hybrid environment that employs small direct-current motors, SMA powered pneumatic valves, and custom air muscles,21 responding to a network of analog and capacitance-based sensors. During its development, the Hylozoic Ground evolved into an immersive architectural environment “that behaves like [a] highly mobile crowd of interlinked individuals acting in chorus,” 22 beginning to hint at what future intelligent environments could be. Compared with the Air Flow(er) project, where SMA is used as a sensor, processor, and actuator, Hylozoic Ground deploys SMA exclusively as an actuator. Its contribution to the use of SMA lies in the experience it creates, using different SMA lengths and different wire diameters to produce a complex and responsive system of movement.
In 2006, David Benjamin and Soo-in Yang prototyped Living Glass with the main premise that an architectural element should respond to the varying conditions in its environment. To do so, it has to collect information from the environment, process that information, and trigger an appropriate response. With these goals in mind, Living Glass was conceived as a transparent silicon matrix containing an arrangement of slits/apertures and interfaced with sensors and actuators. The resulting surface is thin, transparent, and light. Integrated sensors register the rise in carbon dioxide, which in turn triggers the embedded SMA wire (actuators) to open the surface slits, fostering air exchange. Benjamin and Yang experimented with the variables of thickness, topography, length of surface cuts, shape of the cuts, and wire placement in order to determine the most effective relationship between the cuts and the wire,23 resulting in a full-scale prototype featuring an array of “gills” linked to an array of sensors (Fig. 3).
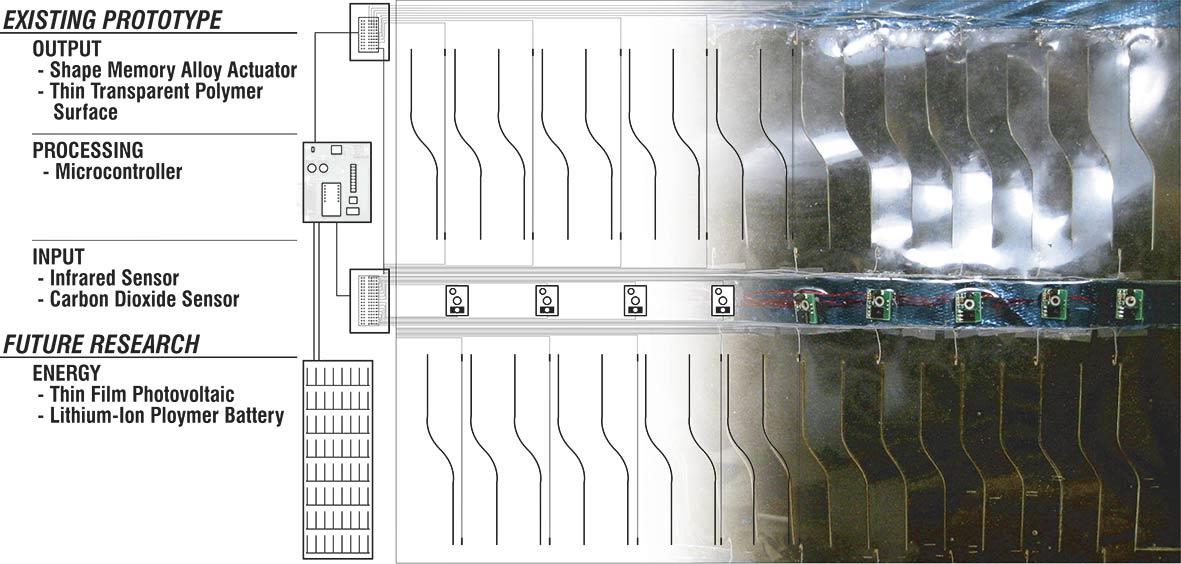
Figure 3.
3
Living Glass project prototype.
Embedding the SMA wire into a surface presents another way to activate a surface or an architectural element, but this approach requires experimentation and close observation of the surface movement caused by the wire, as shown by the rigorous studies for Living Glass. This approach also required a surface edge restriction to leverage the internal force generated by the embedded wire’s movement. The composite surface demonstrated that a certain level of fluidity is possible when smart materials, embedded electronics, and a material matrix are integrated. As Living Glass demonstrates, embedding SMA into a surface has the power to change its topography, but the surface does not have to be light and soft.
Marco Formentini and Stefano Lenci, engineers from the Department of Civil and Building Engineering and Architecture at the Polytechnic University of Marche in Italy, proposed a ventilated façade system with aluminum panels actuated by SMA wire. In this project, SMA is used as a thermal sensor and as an actuator, similar to the Air Flow(er) device, making the operation of the panels energy independent, i.e., responsive to the ambient heat they absorb. When the SMA wire affixed along each panel’s lower edge reaches 86ºF [30ºC], it contracts just enough to slightly buckle the panel. These openings then allow air to enter the wall cavity, producing a chimney effect and promoting ventilation to cool the cavity. As the temperature falls again to 68°F [20ºC], the cooling wire closes the panels, allowing a wall cavity to retain the heat.24 What makes this project particularly interesting is its focus on making an otherwise static, hard wall paneling system active and responsive to the dynamics of the temperature changes in its surroundings.
EXPLORING THE SMA WIRE GEOMETRY CHANGE
The SMA wire can be trained to conform to a particular geometry/shape when heated: when a trained wire is embedded into a surface, it can alter the surface topography and produce a more dramatic movement than that produced by changes in wire length. This was the approach taken for the SKiN project developed by the author. Initial explorations focused on the studies of movement that “trained” SMA wire produces when embedded in the silicone grid. The “V” shaped SMA joints were inserted into the silicon tubing to produce a “programmed” network that animates the grid by opening and closing its gaps. This experiment examined the capacity of an SMA wire joint to act as a point source of actuation within a network or surface. To better understand the gradient of movement, the grid was restricted by anchoring joint points to a flat surface in a variety of configurations. The behavior ranged from expanding grid cells to vertical movements of the grid’s regions with surprisingly agile and pronounced movement amplitudes (Fig. 4).
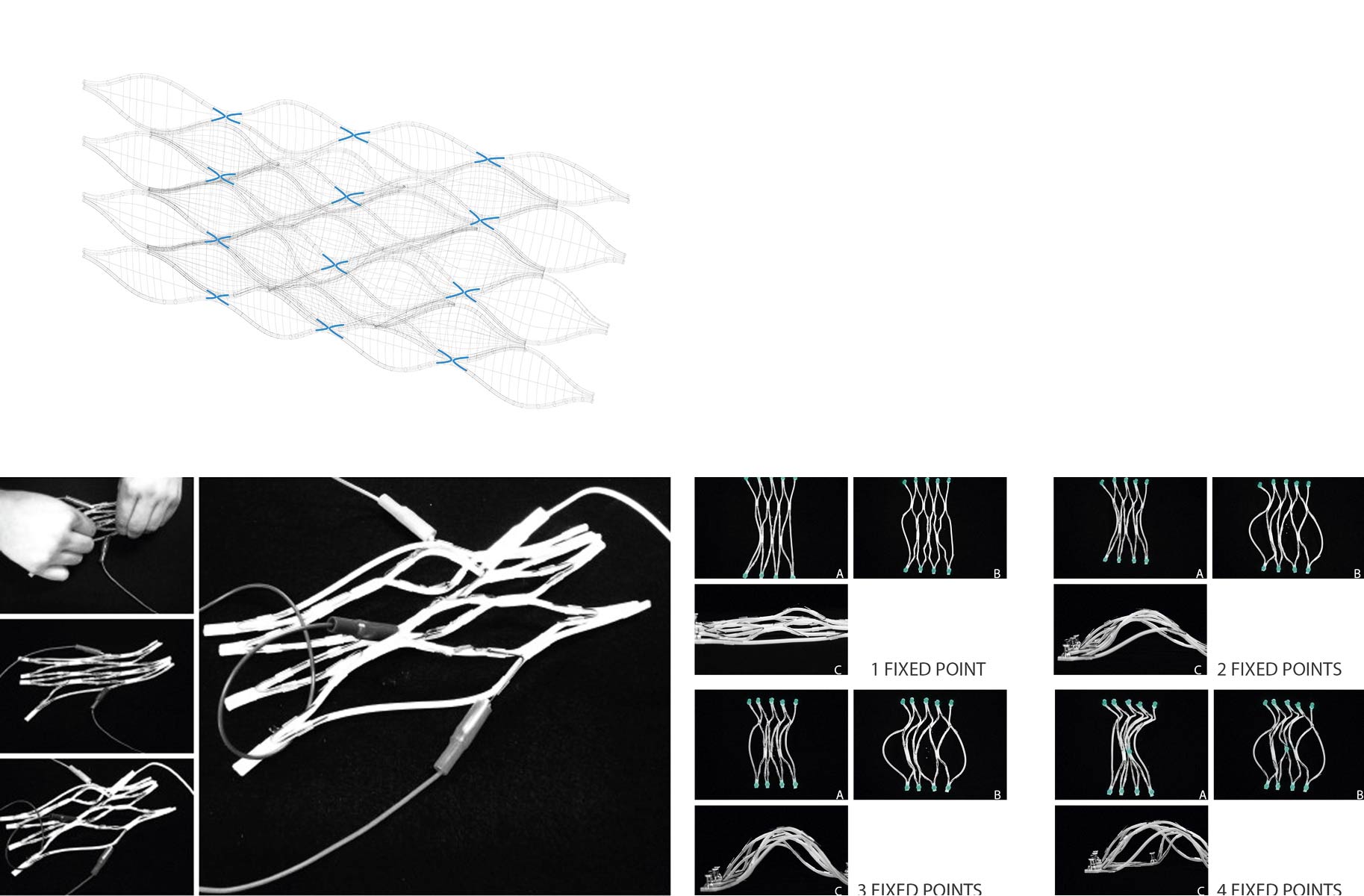
Figure 4.
4
Top image: point actuation using “V” SMA joints. Bottom images: Fixed points test showing the grid deformation.
SKiN’s second experiment examined the capacity of SMA wire to act as an embedded linear source of actuation. The “long” (45 cm) [17.72 in.] pieces of SMA wire “trained” into large amplitude (15 cm) [5.91 in.] waves were threaded through the silicone tubing grid and then integrated into a silicone surface. The fusion of the grid and silicone matrix created a flexible surface that when activated achieved a level of material equilibrium; the SMA wire pulled the surface into a particular shape dictated by its large amplitude wave shape, while the weight of the silicone layer pulled the material system back to its original shape, deforming the SMA wire in the process and returning it into its original dormant configuration, ready to be activated again. In this experiment, the local movements of each wire resulted in a complex global movement of the entire surface where each shift of a cell depended on the movement of adjacent cells or regions (Fig. 5).

Figure 5.
5
Top image: linear actuation using long pieces of SMA wire “trained” into large amplitude waves. Bottom images: mapping of the diagrid points using motion tracking.
Both forms of actuation, point and linear, provide a good strategy to capitalize on the aggregation of local movements to produce a global surface dynamic effect. Point actuation facilitates greater variety of movement with the option to reverse joints orientation and produce twisted movement. Linear actuation produces a more dramatic movement and reduces the number of connections needed to electrically actuate the SMA. The main contribution of the SKiN project is its study of the relationship between the form of the SMA actuator and the surface deformation it produces. Each type of actuation produces a specific surface deformation. If used together, these two types of actuation could result in a number of patterns, producing dynamic surface choreographies (Fig. 6).
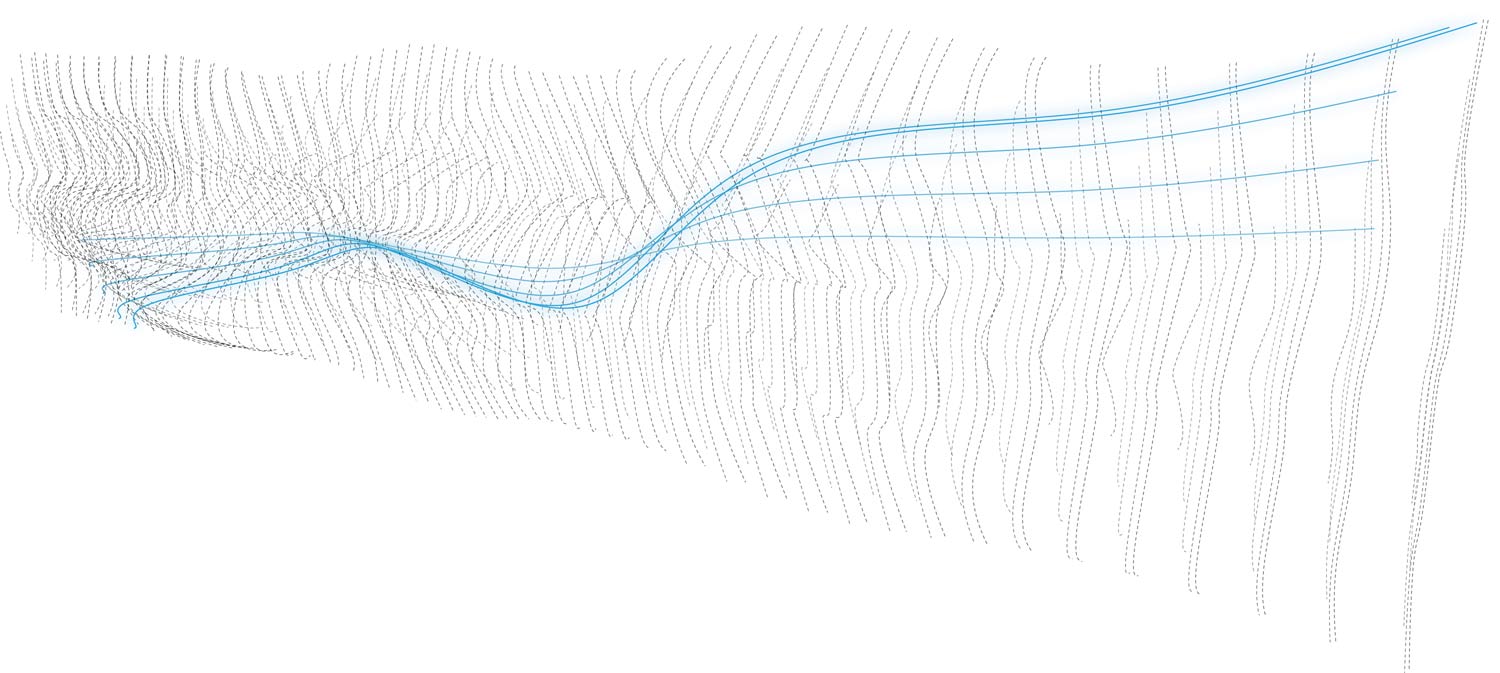
Figure 6.
6
Possible surface choreographies.
In contrast to theSKiN project, where surface movement was at the center of the exploration, the focus of the Lattice project, also prototyped by the author, is an actuated structure with structural hierarchy that can facilitate movement. The system is based on interconnected rib elements, each consisting of three layers of flexible plastic strips connected sectionally to form cells.
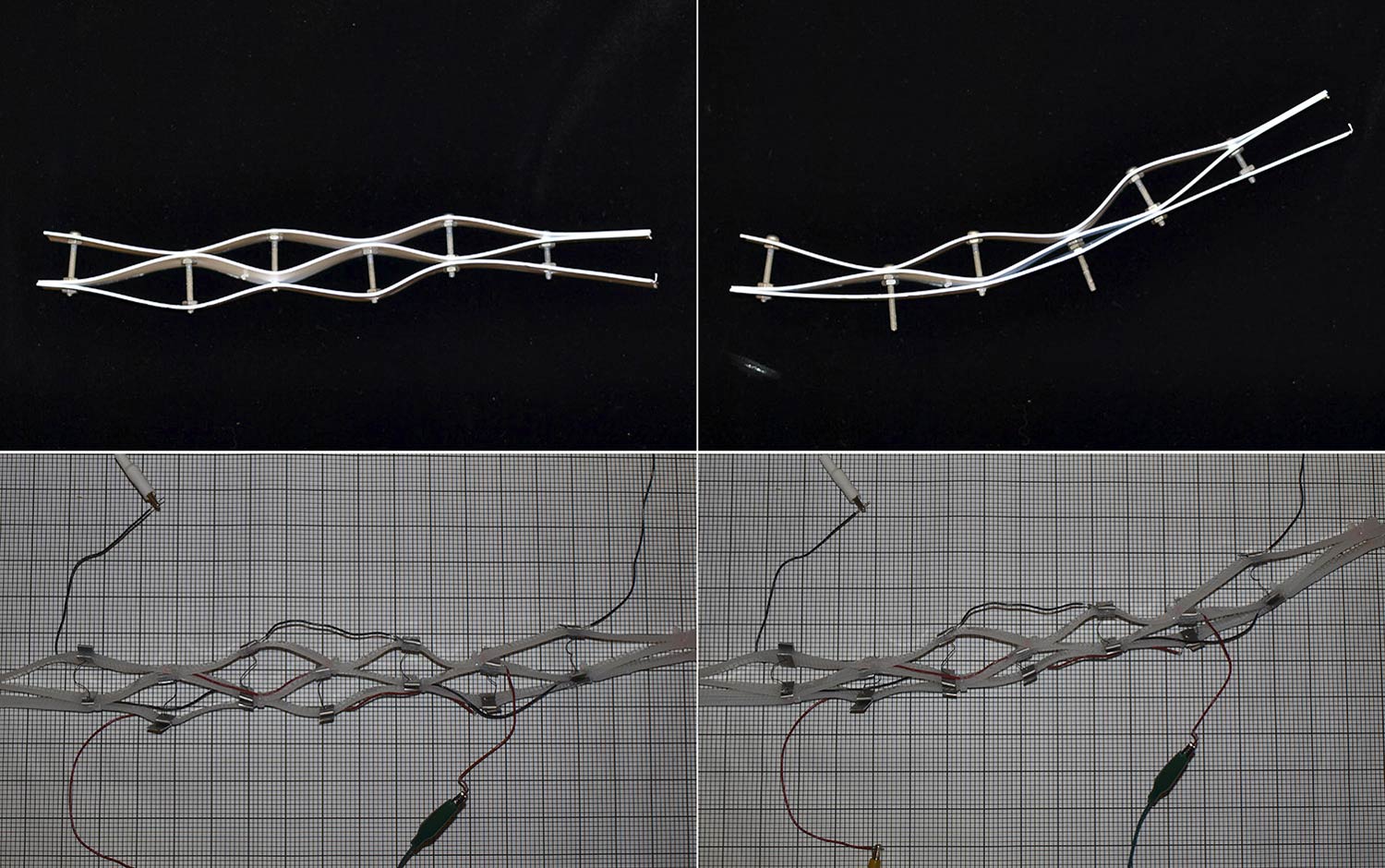
Figure 7.
7
Top images: sectional exploration of the rib element showing how a change in a distance between the rib layers changes the rib’s curvature. Bottom images: behavior of the rib after SMA springs are integrated between its layers.
The upper two images in Figure 7 show sectional studies of the rib element, demonstrating that the rib’s cell geometry manipulation (or rib’s layer distance) produces a dynamic transformation of the entire rib. These same characteristics were employed in the design of a gridshell by Jordi Truco and Sylvia Felipe in their MA dissertation at the Architectural Association School of Architecture: 25 here, threaded rods and nut stoppers were used to adjust the cell geometry and produce curvature variation across the gridshell form. The Lattice project draws from the structural behavior of this elastic lattice, incorporating SMA springs to develop a kinetic lattice system. The lower two images in Figure 6 show experiments in kinetic adjustments of the cell geometry (i.e., kinetic adjustment of the distance between the rib layers) by integrating SMA springs into the rib cells.
When activated, these SMA elements are able to induce movement of the entire rib element and, consequently, of the entire lattice structure. The system becomes kinetic when activation of the SMA spring generates tension within the middle layer of the lattice, bending the ribs. Strategic placement of the actuators across the lattice produces an accumulated bending effect and deformation of the entire lattice. The main contribution of the Lattice project is in the accumulated effect of SMA springs (Fig. 8) that amplify their strength to produce a robust directional deformation of the entire lattice structure.
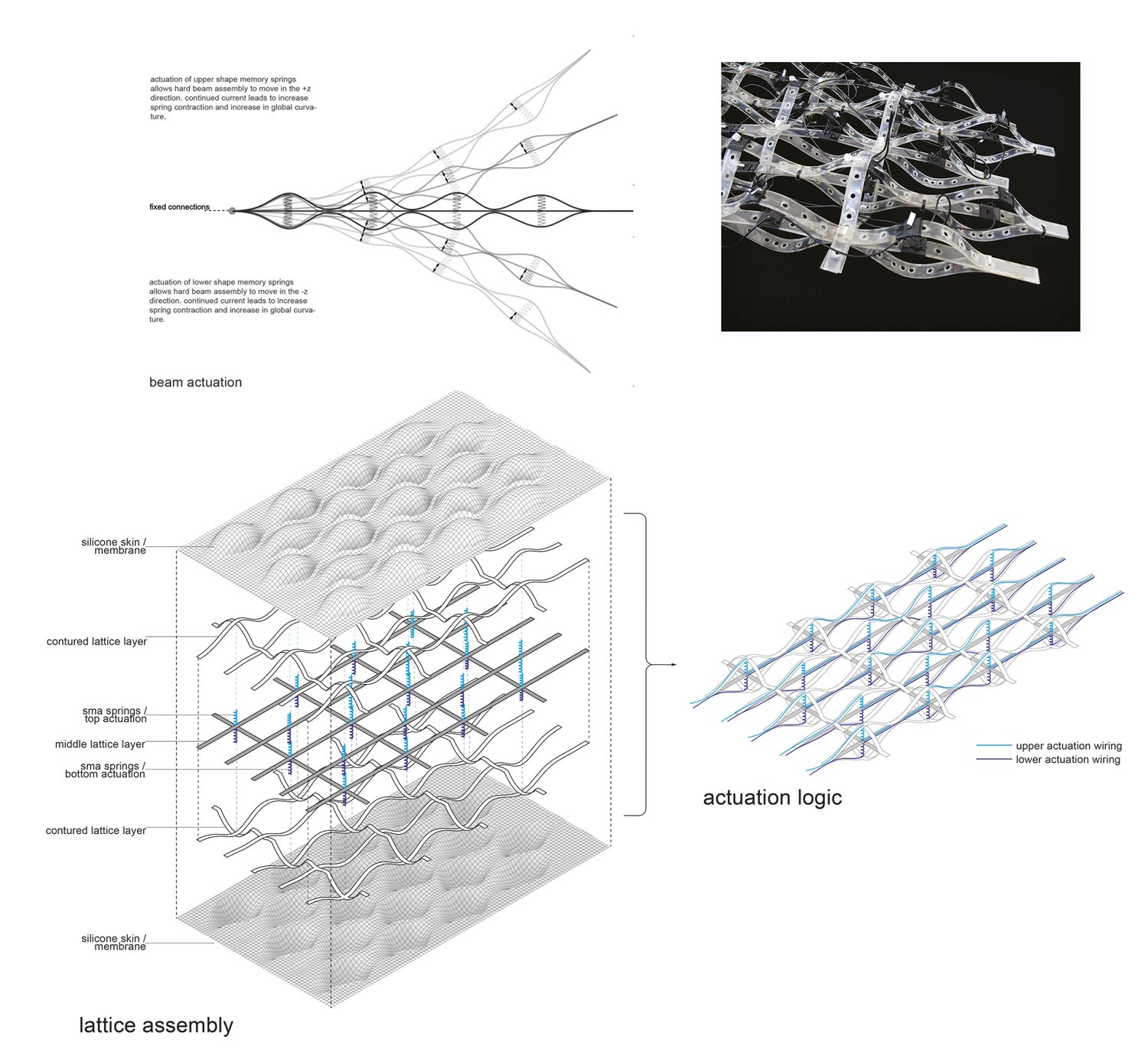
Figure 8.
8
Top images: bending amplitude and cell deformation after SMA spring actuation and Lattice structure prototype. Bottom image: lattice assembly and the actuation logic.
Combining structural behavior of the gridshell lattice with dynamics of the SMA spring is what differentiates the use of shape-trained SMA in the Lattice project from the use of SMA in other mentioned projects. This could be a direction for further development of SMA actuation in architecture where structural behavior and dynamics reinforce each other’s effects to form a dynamic system (Fig. 9).
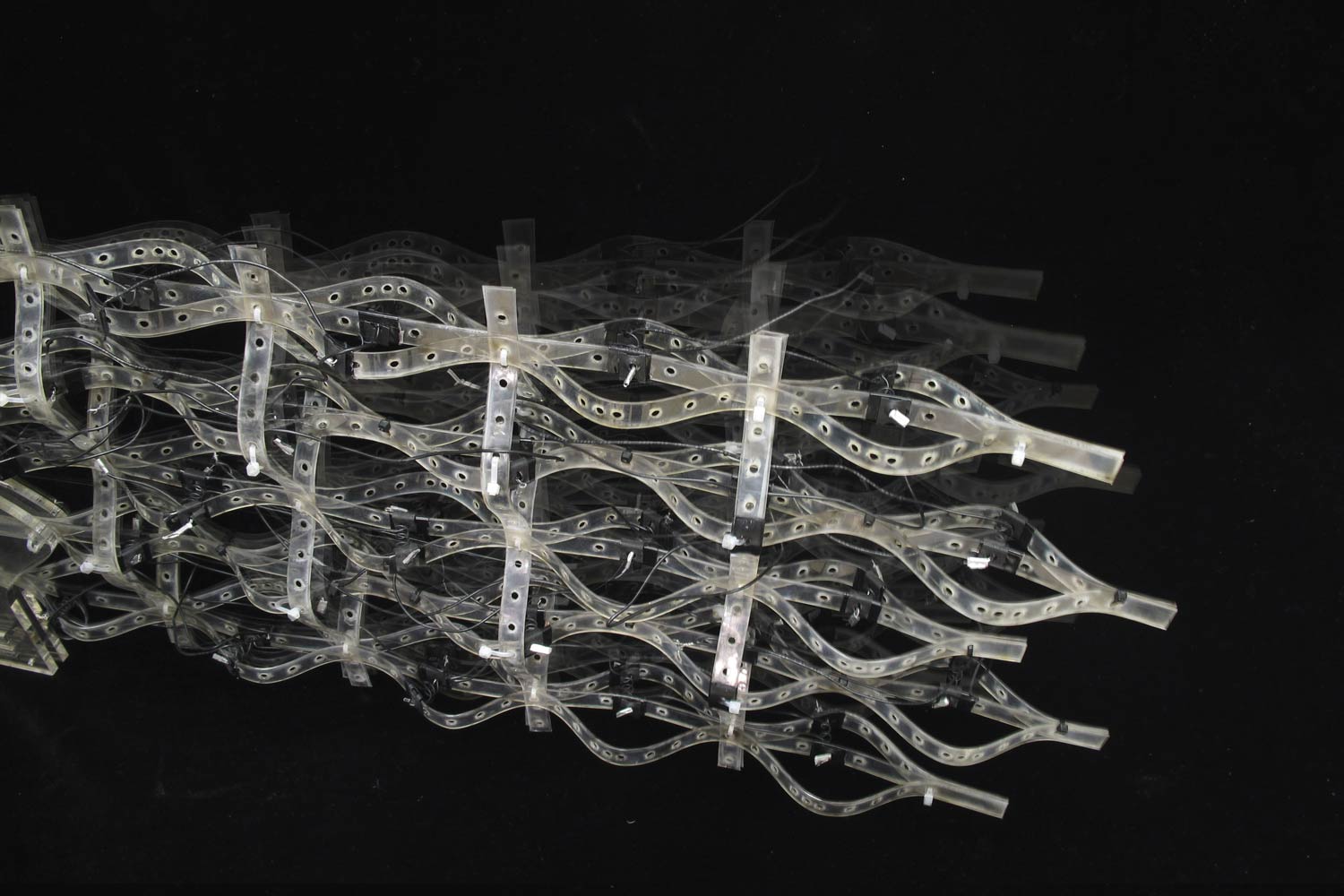
Figure 9.
9
Prototype of the Lattice structure.
HYBRID SYSTEMS OF MATERIAL ACTUATION
Hybrid systems can amplify or reinforce the work of SMA and hold promise for the wider use of SMA in architectural assemblies. Hybrid systems between SMA components and more traditional mechanical components, even without completely eliminating the use of mechanical components, could still be an effective way to reduce their use. Hwang Yi et al.26 propose a kinetic shading device that operates by switching as needed between a geared DC motor and an SMA spring actuator. The proposed actuator uses two-way SMA wire that remembers two different shapes for high and low temperatures, enabling SMA actuators to perform during both the high-temperature phase (austenite) and a low-temperature phase. Utilizing an origami pattern, the component houses an SMA spring in its shaft to open and close the aperture in response to the surrounding temperature (Fig. 10).
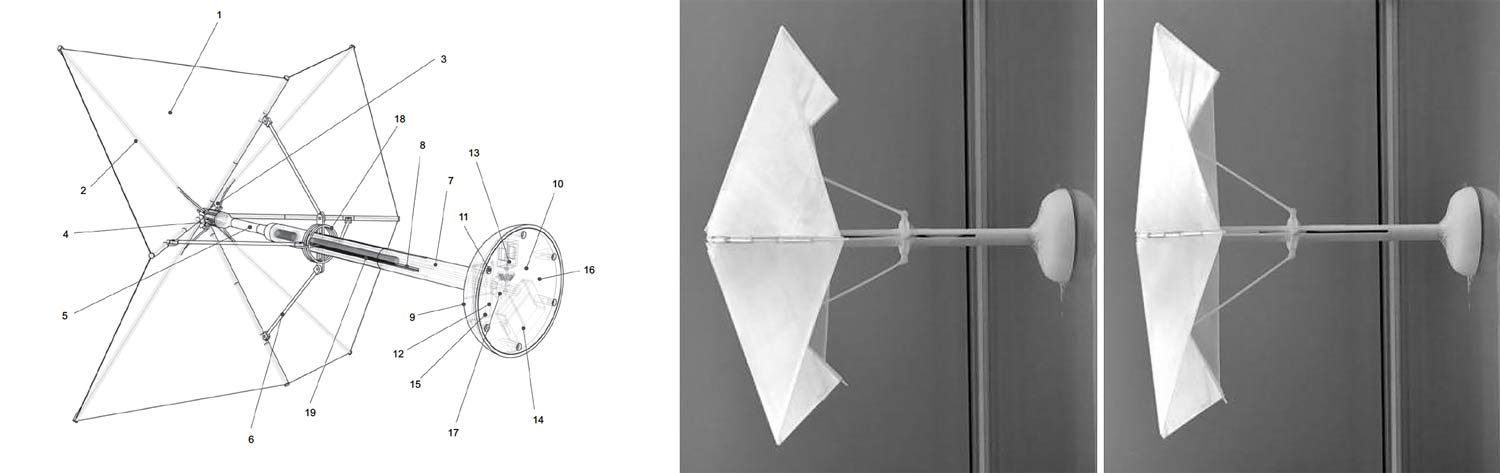
Figure 10.
10
Left image: kinetic façade device diagram, (1) origami panel, (2) panel hinge, (3) panel joint, (4) joint constraints, (5) panel fixing head, (6) driving arm, (7) body part, (8) slider slit, (9) gear box cap, (10) back cover plate, (11) screw groove, (12) Wi-Fi micro controller, (13) micro geared DC motor, (14) Li-Po battery, (15) motor-driver module, (16) sensor, (17) bevel gear, (18) ring, (19) bevel gear worm. Middle image: device operation when outside temperature is 18.2⁰C [64.8⁰F]. Right image: device operation when outside temperature is 32.3⁰C [90.1⁰F].
In combining the performance of the SMA spring with the DC motor, their project demonstrates that hybrid use is possible and even desirable when the temperature is outside of the shape-programming range of the wire. This approach can augment SMA performance by using discrete motor power and adding the possibility of user control for times when temperature ranges render SMA inactive.27
Shape Memory Alloy can be combined with other active structures to produce a composite structure capable of retaining multiple shape configurations. Wei Wanga and his team developed SMA-based composite actuators that consist of fusible alloy (FA) material, Ni-chrome (Ni-Cr) wires, and SMA wires brought together in a smart soft composite (SSC) structure. The matrix of this composite material is highly flexible Polydimethylsiloxane; SMA wires are positioned in this matrix in the upper and lower zone, and FA with Ni-Cr wire is positioned at the edges of the actuator. When activated, the embedded FA elements are melted by applying current to the Ni-Cr wires. The SMA wire is then activated to bend the actuator. Electrical current is applied to produce shape change of the SMA wire until the FA elements solidify to retain the produced deformation.
SMA-based SSC structures have soft morphing capabilities that allow the actuator to produce a smooth continuous deformation and retain multiple shape configurations. The composite structure of the actuator can be tailored to its application by modifying its geometry, volume, position, and composition of the embedded FA structures. Like an elephant trunk or an octopus arm, they can retain shape by changing locally between a high and low stiffness state when electrically stimulated. This research in SSC could be a step toward a new kind of material that can morph into complex forms. This lightweight morphing structure with variable stiffness could find an application in the auto or aerospace industries (morphing wings) but could also be used in adaptive building skins where change of geometry of the skin can influence its performance.28
DISCUSSION
Designing an SMA Actuation
The examples described in the paper delineate two modes of SMA wire kinetic action, both driven by phase change: the wire’s change in length and change in a trained wire’s geometry/shape. The wire’s integration into a dynamic assembly dictates the way it exerts its force. When imbedded into material substrate, it will change the topography of the surface (Living Glass and SKiN) or produce a force strong enough to cause surface buckling (ventilated façade by Formentini and Lenci) or deformation of the lattice ribs (Lattice). When its force (dimensional contraction) is amplified by the use of a lever, the wire’s action can be calibrated by change in length or diameter to move at different amplitudes (Hylozoic Ground). When necessary, elastic or spring elements can be integrated into a kinetic assembly to act as a counterforce and return the element to a neutral/nonactive position (Air Flow(er)).
Shape-trained wire or SMA springs, “baked” into a particular geometric shape, can produce more robust kinetic motion since they generate more force during their phase change (SKiN and Lattice). The variation in the “trained” shape and length of SMA segments produces differentiation in their movements. When their ends are constricted, they can produce more dramatic deformations (SKiN and ventilated façade by Formentini and Lenci). Using an array of strategically positioned SMA actuators (springs) can produce a significant force able to deform regions of a construct (Lattice). Combining SMA actuation with a DC motor can extend the range of operation of an SMA wire beyond its designed limits and allow for user control (kinetic shading device by Hwang Yi et al.). When used as part of the soft composite structure in combination with other active structures, a shape-trained SMA could produce an actuator with smooth continuous deformation that can retain multiple shape configurations (smart soft composite actuator by Wei Wanga et al.).
Challenges and Limitations of Material-Based Actuation
Even though the application and behavior of SMA has been extensively studied in other disciplines,29 its kinetic application in architecture is still being researched. More research is needed to determine how the behavior of SMA will change over longer periods of operation, especially under different working temperatures in the field, which may include significant and unpredictable fluctuations.30 Another concern is that many current experiments with the SMA are performed on a small scale, but these materials do not always scale up easily: large-diameter SMA can produce a significant mechanical force but the resulting material deformation can be weak for building scale actuation.31 In the case of SMA actuation triggered by ambient temperature stimuli, as seen in the Air Flow(er) project by Andrew Payne, the lack of an option for a user control can also be problematic since this kind of actuation is limited by climate conditions.
Opportunities of Material-Based Actuation
Material-based actuation can be a viable way to make responsive building components more flexible, lighter, and compact because, among other things, the material itself can sense and actuate with little or no external power supply. The kinetic shading device by Hwang Yi et al. demonstrates that using a two-way SMA actuator can improve the overall performance of the ambient activated SMA and extend the range of its performance. Combined with a DC motor, this range is increased even further.32 Hybrid systems like these, combining material actuation and light mechanical components, could bring material actuation closer to building industry readiness.
Actuators made of SMA can be integrated into other material layers, as seen in theLiving Glassand SKiN projects, to directly shape or transform the surface matrix itself. For a more robust and directional shape manipulation, an assembly system, such as that in the Latticeproject, could be used. Due to its integration with other materials he SSC actuator developed by Wei Wanga et al. is capable of shape retention as well as shape change. The SSCs could be developed as kinetic joints or live hinges that effectively transform surface geometries at the scale of architectural assembly. The movement of SMA actuation is silent, fluid, and effortless, producing a more natural relationship between kinetic surface and user.
CONCLUSION
Integration of new material technologies and kinetics into architectural assemblies can have a transformative effect both on people and the built environment itself. Whether ambient activated or electrically stimulated, architectural components using material actuation could provide not only a new aesthetic for architecture, but also a new level of buildings’ sensitivity to environment changes, producing surfaces more fluidly synchronized with users than their mechanical counterparts. Smart materials are usually designed for a specific behavior, though, and this presents a limitation in their degree of responsiveness. While Hensel and Menges 33 suggest that smart materials should be able to evolve so that they can respond to varying stimuli and stay active, Joanna Aizenberg describes difficulties in developing multifunctional materials. In biological organisms, change between the optical, electrical, or magnetic functions of the tissue happens seamlessly; in artificial materials, this requires specific interfaces that are difficult to replicate.34
Shape Memory Alloy is a functional material: it can serve as a sensor and actuator and, to some extent, mimic a biological organism by synchronizing with environmental changes. However, for any material to respond to varying stimuli, a complex molecular communication, akin to a living cell mechanism, would have to be established. This remains a limitation for SMA actuators and many other smart materials. The future of dynamic building skins will likely belong to low-energy systems that can harvest heat from the sun or kinetic energy of the wind. In the projects described in this paper, the “sensing” and “actuating” capacities are built into the material, eliminating the need for complex mechatronic assemblies. Such systems of dynamic activation that rely on innate, albeit designed, properties of materials are perhaps the most promising direction for developing adaptive building envelopes.
Notes
1
Michelle Addington and Daniel L. Schodek, Smart Materials and New Technologies for Architecture and Design Professions (Burlington MA, USA: Architectural Press, 2005).
2
George Jeronimidis, “Biodynamincs,” in Emergence: Morphogenetic Design Strategies, ed. Michael Hensel, Achim Menges, and Michael Weinstock (Chichester, UK: Wiley-Academy Press, 2004), 92–95.
3
Thomas Speck and Nick P. Rowe, “How to Become a Successful Climber – Mechanical, Anatomical, Ultrastructural and Biochemical Variations during Ontogeny in Plants with Different Climbing Strategies,” in Proceedings of the Fifth Plant Biomechanics Conference, ed. Lennart Salmén (Stockholm, Swed.: 2006), 103–08.
4
Crawford Stanley Holling, “Resilience and Stability of Ecological Systems,” in Annual Review of Ecology and Systematics, Vol. 4 (1973): 1–23 - doi:10.1146/annurev.es.04.110173.000245.
5
David Leatherbarrow, “Architecture’s Unscripted Performance,” in Performance Architecture: Beyond Instrumentality, ed. Branko Kolarevic and Ali M. Malkawi (New York: Spon Press, 2005), 5–19.
6
Crawford Stanley Holling, “Resilience and Stability.”
7
Addington and Schodek, Smart Materials.
8
David Correa, Athina Papadopoulou, Christophe Guberan, Nynika Jhaveri, Steffen Reichert, Achim Menges, and Skylar Tibbits, “3D-Printed Wood: Programming Hygroscopic Material Transformations,” 3D Printing and Additive Manufacturing 2, no. 3 (September 2015): 106–16 - doi:10.1089/3dp.2015.0022.
9
Gideon Fink Shapiro, “Award: InVert Self-Shading Windows Flip Energy Efficiency On Its Head,” ARCHITECT, July 12, 2020 - https://www.architectmagazine.com/awards/r-d-awards/award-invert-self-sh..., accessed May 15, 2021.
10
Efilena Baseta, “Translated Geometries” - http://cargocollective.com/efilenabaseta/TRANSLATED-GEOMETRIES, accessed December 15, 2021.
11
Tian Chen and Kristina Shea, “An Autonomous Programmable Actuator and Shape Reconfigurable Structures Using Bistability and Shape Memory Polymers,” 3D Printing and Additive Manufacturing 5, no. 2 (Jun 2018): 91–101 - doi:10.1089/3dp.2017.0118.
12
Wen Shao Chang and Yoshikazu Araki, “Use of Shape-Memory Alloys in Construction: A Critical View,” in Proceedings of the Institution of Civil Engineers, Civil Engineering 169 CE2 (May 2016): 87–95 - doi:10.1680/jcien.15.00010.
13
Ibid.
14
Dynalloy, Inc., “ Technical Characteristics of Flexinol® Actuator Wires,” - https://www.dynalloy.com/tech_data_wire.php, accessed May 13, 2021.
15
Marco Formentini and Stefano Lenci, “An Innovative Building Envelope (Kinetic Façade) With Shape Memory Alloys Used as Actuators and Sensors,” Automation in Construction 85 (2018): 220–31.
16
Kazuhiro Otsuka and C. Marvin Wayman, Shape Memory Materials (Cambridge, UK: Cambridge University Press, 1998).
17
Andrew Payne, “Air Flow(er)” (2010) - http://www.liftarchitects.com/#/air-flower/, accessed January 10, 2021.
18
Philip Beesley, “Hylozoic Ground: Canadian Pavilion, Venice Biennale,” - http://www.philipbeesleyarchitect.com/sculptures/0929_Hylozoic_Ground_Ve..., accessed January 10, 2021.
19
Rob Gorbet, “Revealing the Hylozoic Ground Interaction Layer,” in Philip Beesley, Hylozoic Ground: Liminal Responsive Architecture, eds. Pernilla Ohrstedt and Hayley Isaacs (Toronto: Riverside Architectural Press, 2010), 97–111.
20
Ibid.
21
Beesley, Hylozoic Ground, 112-23.
22
Ibid.
23
David Benjamin and Soo-in Yang, “Flash Research 1: Living Glass,” in Life Size (New York: Graduate School of Architecture, Planning and Preservation of Columbia University, 2006), 31–51.
24
Formentini and Lenci, “An Innovative Building Envelope,” 220–31.
25
Michael Hensel, Achim Menges, and Michael Weinstock, Emergent Technologies and Design: Towards a Biological Paradigm for Architecture (London: Routledge, 2010).
26
Hwang Yi, Dongyun Kim, Yuri Kim, Dongjin Kim, Je-sung Koh, Mi-Jin Kim, “3D-printed Attachable Kinetic Shading Device with Alternate Actuation: Use of Shape-Memory Alloy (SMA) For Climate-Adaptive Responsive Architecture,” in Automation in Construction 114 (2020) - doi: 10.1016/j.autcon.2020.103151.
27
Ibid.
28
Wei Wanga, Hugo Rodriguea, Sung-Hoon Ahnab, “Smart Soft Composite Actuator with Shape Retention Capability Using Embedded Fusible Alloy Structures,” Composites Part B: Engineering 78, no. 1 (September 2015): 507–14 - doi:10.1016/j.compositesb.2015.04.007.
29
Ashley N. Bucsek, Harshad M. Paranjape, Aaron P. Stebner, “Myths and Truths of Nitinol Mechanics: Elasticity and Tension–Compression Asymmetry,” Shape Memory and Superelasticity 2, no. 3 (September 2016): 264–71 - doi:10.1007/s40830-016-0074-z.
30
Chang and Araki, “Use of Shape-Memory Alloys.”
31
Hwang Yi et al., “3D-printed Attachable Kinetic Shading Device.
32
Ibid.
33
Michael Hensel and Achim Menges, Morpho-Ecologies: Towards Heterogeneous Space in Architecture Design (London: AA Publications, 2007).
34
Joanna Aizenberg, “Interview 2” Biointerfaces International 2016 Conference, ETH Zurich, October 11, 2016 - www.video.ethz.ch/events/2016/biointerfaces/e6ab5e18-6a51-4e88-b813-497f....
Credits
Figure 1: diagram courtesy of © Andrew Payne.
Figure 2: drawing by © Eric Bury and Philip Beesley, courtesy of Philip Beesley.
Figure 3: courtesy of © David Benjamin.
Figures 4-9: courtesy of © the Author.
Figure 10: courtesy of Hwang Yi.
Vera Parlac is an architect, educator, and researcher focused on integrative approaches to design and practice. She is a registered architect and an Associate Professor at the Hillier College of Architecture and Design at the New Jersey Institute of Technology (NJIT), where she founded the Building Dynamics Laboratory, a design research laboratory where design is engaged as a broadly integrative endeavor by fluidly navigating across different disciplinary territories. Vera’s current research focuses on responsive material systems informed by contemporary models in biology, material science research, mechatronic systems, and robotics. Her research centers on experiments with material systems and assemblies that embody behavior and capacity to adapt under external and internal influences. Among her publications is her book Building Dynamics: Exploring Architecture of Change (2015), co-edited with Branko Kolarevic. Email: parlac@njit.edu
Page start
501
Page end
520
Print Publication Date
January, 2022
Electronic Publication Date
Thursday, January 27, 2022















